Arduino入門教學(13) – 使用光敏電阻控制伺服馬達 (作者:Cooper Maa)
實驗目的
練習用光敏電阻控制伺服馬達(Servo motor)。以兩顆光敏電阻做一個簡單的光源追蹤系統,當發現左邊比較亮時,就控制伺服馬達旋轉到左邊,當發現右邊比較亮時,就控制伺服馬達旋轉到右邊。
讀者必備知識
為了順利進行本項實驗,你必須先知道底下這些基礎知識:
認識光敏電阻。相關資訊可參考「Lab8 使用光敏電阻控制 LED 的開關」一文。 知道如何控制伺服馬達。相關資訊可參考「Lab16 使用可變電阻控制伺服馬達」一文。 材料
- 麵包板 x 1
- Arduino 主板 x 1
- 光敏電阻(photocell) x 2
- 伺服馬達(Servo Motor) x 1
- 10k ohm 電阻 x 2
- 單心線 x N
- 接線
伺服馬達有三條線,電源(紅線)、接地(黑線),以及訊號線。
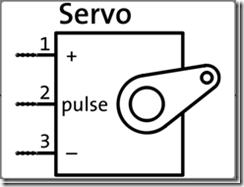
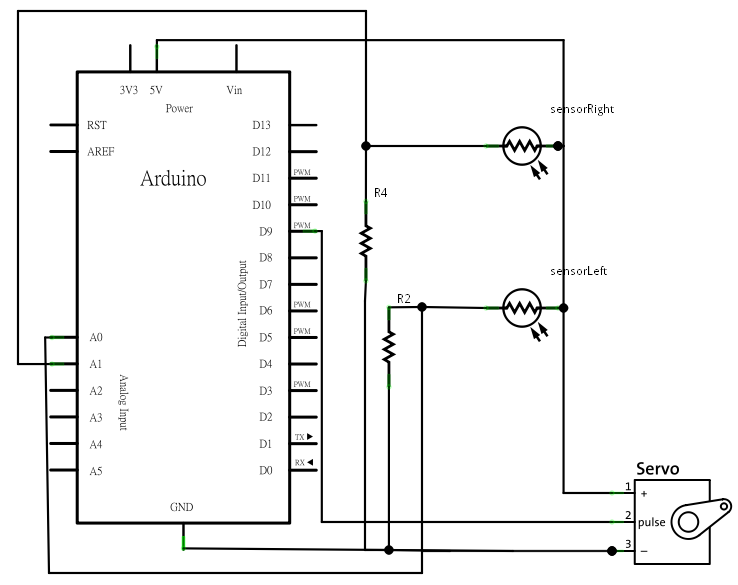
伺服馬達紅線接到 +5v,黑線接到 GND,訊號線接到 pin 9 左手邊的光敏電阻一支腳接到 5V,另一支腳串接一顆 10k 電阻接到 analog pin 0 右手邊的光敏電阻一支腳接到 5V,另一支腳串接一顆 10k 電阻接到 analog pin 1
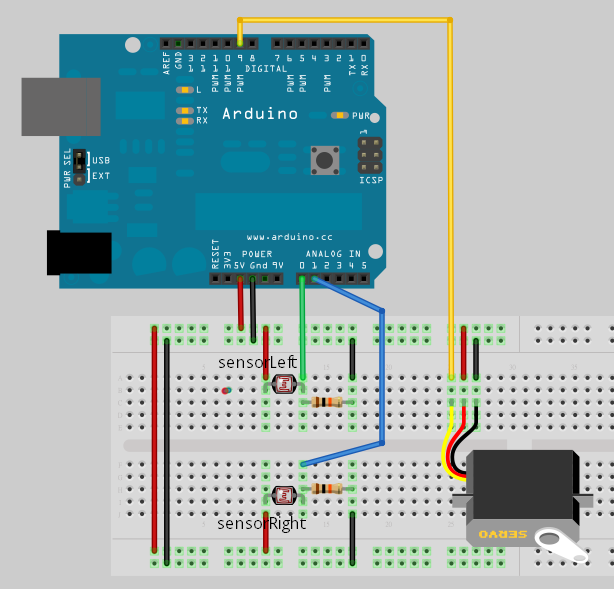
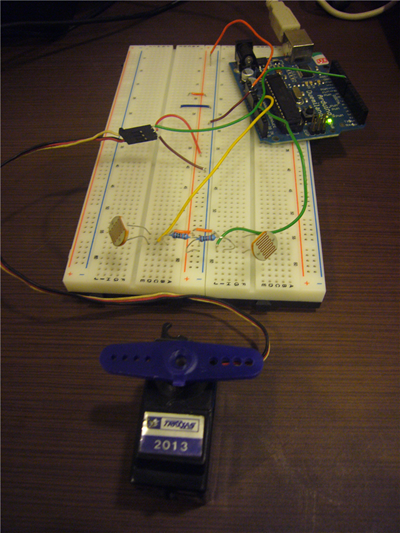
下圖是本實驗的接法,為了判斷哪一邊光線比較強,所以稍微折彎了兩顆光敏電阻,讓它一顆往左彎,另一顆往右彎:
電路圖
程式碼
版本一(PhotocellServo.pde): 底下是這個簡單光源追蹤系統的程式碼,程式的邏輯是,當發現左邊比較亮時,就控制伺服馬達旋轉到左邊(旋轉到 0 度),當發現右邊比較亮時,就控制伺服馬達旋轉到右邊(旋轉到 180 度)。程式同時把左右兩顆光敏電阻的讀值印到了 Serial port,到時就可以用 Serial Monitor 觀察光敏電阻數值的變化。
// 使用光敏電阻控制 Servo
// 引用 Servo Library
#include <Servo.h>
// 建立一個 Servo 物件
Servo myservo;
// 兩顆光敏電阻接在 Analog pin 0 及 pin 1
int sensorLeft = 0;
int sensorRight = 1;
void setup()
{
Serial.begin(9600);
myservo.attach(9); // Servo 接在 pin 9
}
void loop()
{
int readingLeft, readingRight;
// 讀取左右兩顆光敏電阻的讀值
readingLeft = analogRead(sensorLeft);
readingRight = analogRead(sensorRight);
if (readingLeft > readingRight) {
// 左邊光敏電阻較亮,控制 Servo 轉到 0 度
myservo.write(0); // 設定 Servo 旋轉角度
delay(15); // 等 Servo 旋轉
} else {
// 右邊光敏電阻較亮,控制 Servo 轉到 180 度
myservo.write(180); // 設定 Servo 旋轉角度
delay(15); // 等待 Servo 旋轉
}
// 印出左右兩顆光敏電阻的讀值
Serial.print("left: "); Serial.print(readingLeft);
Serial.print(" right: "); Serial.println(readingRight);
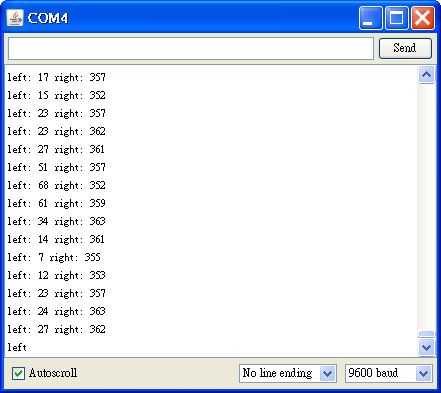
} 編譯這支程式,然後上傳到 Arduino,接著打開 Serial Monitor 就可以看到左右兩顆光敏電阻數值的變化:
底下是示範影片:
版本二(PhotocellServoV2.pde): 這個版本增加一個功能,當左右兩邊光敏電阻光線相差不多時,就控制伺服馬達讓它旋轉到 90 度。
// 使用光敏電阻控制 Servo, Version 2
// 引用 Servo Library
#include <Servo.h>
// 建立一個 Servo 物件
Servo myservo;
// 兩顆光敏電阻接在 Analog pin 0 及 pin 1
int sensorLeft = 0;
int sensorRight = 1;
void setup()
{
Serial.begin(9600);
myservo.attach(9); // Servo 接在 pin 9
}
void loop()
{
int readingLeft, readingRight, difference;
// 讀取左右兩顆光敏電阻的讀值
readingLeft = analogRead(sensorLeft);
readingRight = analogRead(sensorRight);
// 計算差值
difference = abs(readingLeft - readingRight);
// 假如左右兩邊光敏電阻差值不大,就控制 Servo 轉到 90 度
if (difference <= 100) {
myservo.write(90);
delay(15);
} else if (readingLeft > readingRight) {
// 左邊光敏電阻較亮,控制 Servo 轉到 0 度
myservo.write(0); // 設定 Servo 旋轉角度
delay(15); // 等 Servo 旋轉
} else {
// 右邊光敏電阻較亮,控制 Servo 轉到 180 度
myservo.write(180); // 設定 Servo 旋轉角度
delay(15); // 等待 Servo 旋轉
}
// 印出左右兩顆光敏電阻的讀值
Serial.print("left: "); Serial.print(readingLeft);
Serial.print(" right: "); Serial.println(readingRight);
} 動動腦
光敏電阻加上伺服馬達,像這樣的組合可以應用在哪些地方呢?
延伸閱讀
【本文作者為馬萬圳,原文網址為: http://coopermaa2nd.blogspot.tw/2011/01/arduino-lab17-servo.html ,由陳鍾誠編輯後納入本雜誌】