從 Arduino 到 AVR 晶片(1) -- AVR 晶片與 IO ports 範例 (作者:Cooper Maa)
前言
單晶片微電腦 (Single Chip Microcomputer),或稱微控制器 (Microcontroller,縮寫為 µC 或 MCU),是一個將 CPU、記憶體、I/O Port 等周邊電路全部整合為一體的晶片。不像微處理器需要外部電路連接周邊,微控制器的應用只要少許的電路就可以運作,因為所有必要的周邊它都內建了。微控制器主要用在嵌入式系統,例如汽車電子、工業控制、機械控制等領域。
著名的 Arduino 板子上也有一顆微控制器,它是 AVR 的晶片,例如 Arduino UNO, Duemilanove 用的是 ATmega328,Arduino Diecimila 的是 ATmega168,而早期的 Arduino USB 則是使用 ATmega8。
Arduino 在歐美非常流行,因為它超簡單,很快就可以上手,我認為從 Arduino 到 AVR 是一條進入單晶片韌體開發的捷徑,因此著手撰寫這一系列的教學文件,希望這可以幫助想學單晶片韌體開發的新手,也希望能夠拋磚引玉,藉此引出高手發表佳文,同時也希望路過的先進不吝指教。
教學目標
我假設讀者你是單晶片新手,我不打算一次把所有與單晶片有關的東西全塞到你腦袋裏,因為這麼做其實是揠苗助長,適得其反,因此這系列的教學將維持 Arduino 一貫的簡約風格,點到為止。這系列教學的目標為:
- 帶你認識 AVR 單晶片以及其周邊,包括 I/O Ports, Interrupt, Timer, USART, PWM, ADC 等。
授課對象
你必須具備下列基礎:
- 寫過 Arduino 程式 * 如果你沒接觸過 Arduino,建議你先看「 Arduino 入門教學 」。
- 熟悉 C 語言
上課器材
你需要一張 Arduino 板子,一條 USB 傳輸線,以及 Arduino IDE 軟體開發環境:
▲ Arduino UNO 與 USB 傳輸線

▲ Arduino IDE
1. AVR 晶片簡介
AVR 是 ATmel 這家公司設計的 8 位元晶片,晶片架構來自於 Alf-Egil Bogen 和 Vegard Wollan 的構想。AVR 是 Alf (Egil Bogen) and Vegard (Wollan) 's Risc processor 的縮寫。
AVR 目前大概可分為下列幾個家族:
8-bit tinyAVR 系列 8-bit megaAVR 系列 8/16-bit XMEGA 系列 32-bit AVRs 系列 排愈後面的等級愈高,主要是記憶體較大、速度較快、腳位和周邊也比較多。
如果沒有特別聲明,這系列教學中提到的 AVR 指的都是 8 位元的晶片。
Arduino 與 AVR 晶片的關係
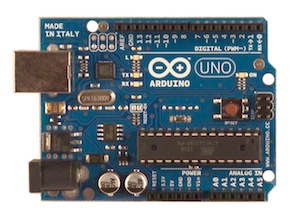
前面說過,Arduino 用的就是 AVR 的晶片,你可以在 Arduino 板子上找到 AVR 晶片,以 Arduino UNO 為例,晶片所在的位置如下圖所示:
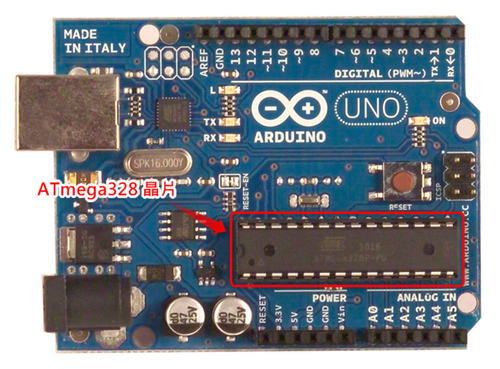
▲ Arduino UNO
在 arduino.cc 這個頁面 中,條列了 Arduino 各種版本的板子、硬體規格、所用的 MCU 等資訊。下列是幾款 Arduino 跟它們所用的 MCU 對照表:
- Arduino UNO: ATmega328
- Arduino Duemilanove: ATmega328 (剛出道時使用 ATmega168)
- Arduino Diecimila: ATmega168
- Arduino Mega: ATmega1280
- Arduino Mega 2560: ATmega2560
- Arduino NG: ATmega168 (剛出道時使用 ATmega8)
- Arduino USB: ATmega8
- ATmega328 晶片的重要特性
Arduino UNO 和 Duemilanove 用的是同一顆 ATmega328 晶片,下表是 ATmega328 的晶片特性摘要:
| 特性 | 說明 |
|---|---|
| Operating Voltage | 1.8V - 5V |
| Flash Memory | 32 KB |
| SRAM | 2 KB |
| EEPROM | 1 KB |
| Clock Speed | 16 MHz |
| External Interrupt | 2 |
| Timer | Two 8-bit Timer/Counters with Prescaler and Compare Mode. One 16-bit Timer/Counter with Prescaler, Compare and Capture Mode |
| PWM Channel | 6 Channels |
| ADC Channel | 8 Channels 10-bit ADC in TQFP package. 6 Channels 10-bit ADC in PDIP package |
| USART | 1 |
| SPI | 1 |
| TWI | Phlilips I2C compatible |
如果你是第一次接觸單晶片,表中很多名詞你可能不認識。不用擔心,這張表你現在只要大概瀏覽一下即可,這些周邊之後會一個個介紹。
ATmega328 的晶片封裝(IC package)
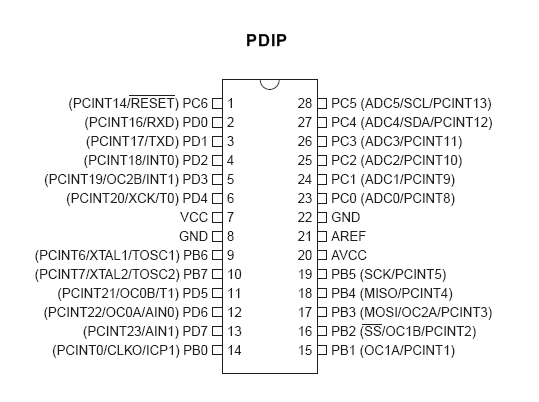
一般來說,晶片的封裝分成 PDIP 和 TQFP 兩種封裝。
註:
- PDIP 是 Plastic Dual Inline Package 的縮寫,指的是塑膠雙排針腳式封裝。
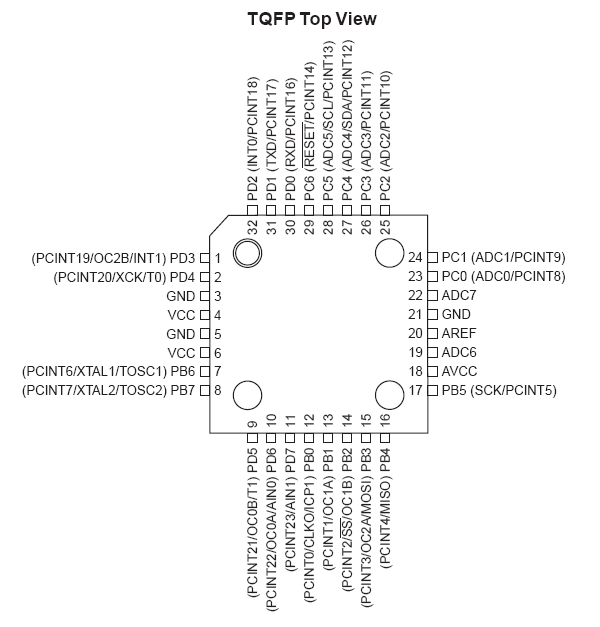
- TQFP Thin Quad Flat Pack 的縮寫,指的是薄型方形扁平封裝。
以 Arduino UNO 所用的 ATmega328 為例,它屬於 PDIP 封裝,其 I/O 腳位配置圖 (Pinout) 如下:
而 ATmega328 TQFP 封裝的 I/O 腳位配置圖 (Pinout) 如下:
2. I/O Ports
Arduino 板子所用的晶片 (以 ATmega8 和 ATmega168/328 為例) 有三個 8-bit 的 PORTs :
- B: 對應 Arduino 的 digital pin 8 to 13
- C: 對應 Arduino 的 analog input pin 0 to 5
- D: 對應 Arduino 的 digital pins 0 to 7
Arduino 與 AVR 晶片腳位對應表
底下這張圖顯示 Arduino 跟 ATmega8 之間的腳位對應關係:
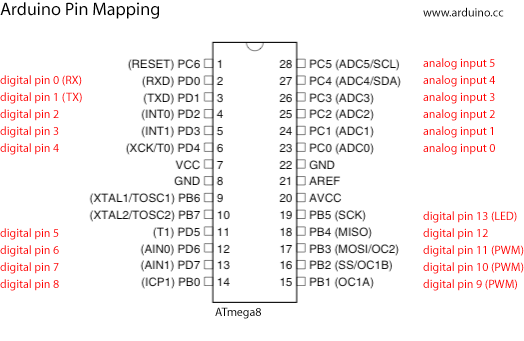
▲ 圖片來源: arduino.cc
例如,Arduino 的 pin 13 對應的腳位為 PB5。
而底下是 Arduino 跟 ATmega168 的腳位對應關係圖:
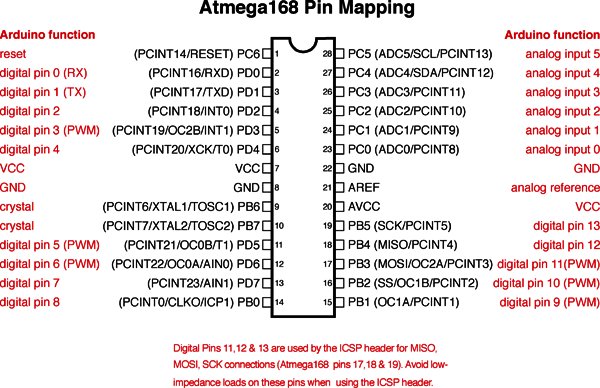
▲ 圖片來源: arduino.cc
Arduino UNO 和 Arduino Duemilanove 用的晶片都是 ATmega328,Arduino Diecimila 用的是 ATmega168,而早期的 Arduino USB 則是使用 ATmega8。
註: ATmega328 跟 ATmega168 的腳位配置 (Pinout) 是一模一樣的。
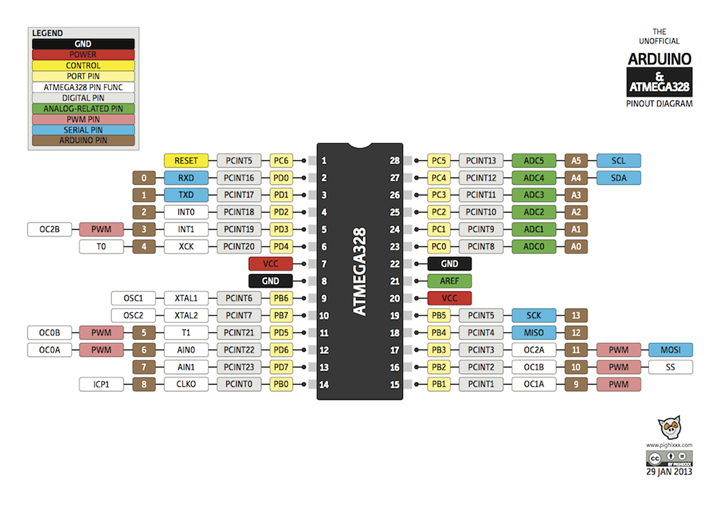
- 2013/4/12 補充: 有個叫 Pighixxxx 的義大利人畫了很多 Arduino 的 pinout diagrams ,搭配這些圖學習會更方便。
I/O Ports 暫存器簡介
AVR 晶片每個 port 都受三個暫存器控制,分別是 (x 代表 B, C, D):
- DDRx 暫存器: 用來決定腳位是 INPUT 或 OUTPUT。
- PORTx 暫存器: 用來控制腳位輸出訊號為 HIGH 或為 LOW
- PINx 暫存器: 用來讀取腳位的輸入訊號
2.1 Blink part 1
實驗目的
讓一顆燈號閃爍,每隔一秒切換一次燈號。
材料
- Arduino 主板 x 1
- LED x 1
接線
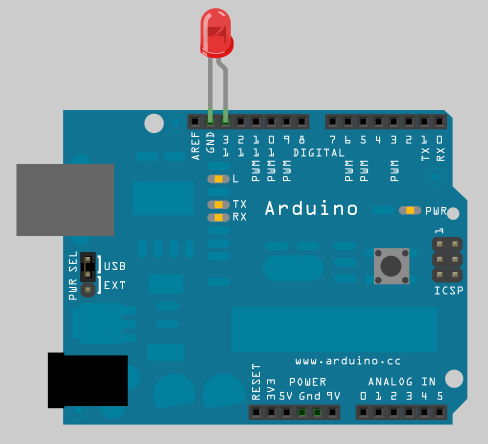
把 LED 接到 Arduino 板子上,LED 長腳 (陽極) 接到 pin13,短腳 (陰極) 接到 GND,如下圖:
程式碼
先來看 Arduino 版本的 Blink 程式:
/*
* Blink.pde: 讓一顆燈號閃爍,每隔一秒切換一次燈號
*/
const int ledPin = 13; // LED pin
void setup() {
pinMode(ledPin, OUTPUT); // 把 ledPin 設置成 output pin
}
void loop() {
digitalWrite(ledPin, HIGH); // 打開 LED 燈號
delay(1000); // 延遲一秒鐘
digitalWrite(ledPin, LOW); // 關閉 LED 燈號
delay(1000); // 延遲一秒鐘
}這是 Arduino 的入門程式,相信你應該很熟悉。
從 Arduino 與 AVR 腳位對應關係圖可知,PB5 就是 pin 13,所以現在我們可以改用 I/O Ports 暫存器重新改寫程式:
/*
* Blink.pde: 讓一顆燈號閃爍,每隔一秒切換一次燈號
* schematic:
* Connect a LED on PB5 (Arduino pin 13)
*/
void setup()
{
DDRB |= (1 << 5); // 把 PB5 設置成 output pin
}
void loop()
{
PORTB |= (1 << 5); // 打開 LED 燈號
delay(1000);
PORTB &= ~(1 << 5); // 關閉 LED 燈號
delay(1000);
}PB5 是 PortB 的 bit 5,所以我們用 (1 << 5) 當作位元遮罩 (bit mask)。 要特別注意的是,在設定 DDRx 暫存器的時候,1 是代表 OUTPUT,而 0 是代表 INPUT。
2.2 Blink part 2 : 用 _BV() 巨集把程式變得清晰易讀
前一篇的程式,如果用 _BV() 巨集改寫的話,會變得比較清晰易讀:
/*
* BlinkWithBV.pde: 讓一顆燈號閃爍,每隔一秒切換一次燈號,使用 _BV() 巨集
* schematic:
* Connect a LED on PB5 (Arduino pin 13)
*/
/* 在 avr-libc 中的 sfr_defs.h 有這樣的定義:
#define _BV(bit) (1 << (bit))
*/
void setup()
{
DDRB |= _BV(5); // 把 PB5 設置成 output pin
}
void loop()
{
PORTB |= _BV(5); // 打開 LED 燈號
delay(1000);
PORTB &= ~_BV(5); // 關閉 LED 燈號
delay(1000);
}BV 是 Bit Value 的縮寫。_BV() 巨集的定義為:
#define _BV(x) (1 << x)所以 _BV(5) 就是 bit 5,由此我們馬上可以聯想到,DDRB |= _BV(5) 這行代表的是「把 PB5 這支腳位設置設 OUTPUT」(註: 1 是 OUTPUT,0 是 INPUT)。
位元遮罩
我們可以把前面的程式稍微改良一下:
/*
* BlinkWithbitMask.pde: 讓一顆燈號閃爍,每隔一秒切換一次燈號,使用 _BV() 巨集
* schematic:
* Connect a LED on PB5 (Arduino pin 13)
*/
/* 在 avr-libc 中的 sfr_defs.h 有這樣的定義:
#define _BV(bit) (1 << (bit))
*/
#define bitMask _BV(5) // bit mask of PB5
void setup()
{
DDRB |= bitMask; // 把 PB5 設置成 output pin
}
void loop()
{
PORTB |= bitMask; // 打開 LED 燈號
delay(1000);
PORTB &= ~bitMask; // 關閉 LED 燈號
delay(1000);
}利用 bit mask (位元遮罩) 的概念,把 _BV(5) 定義成 bitMask 巨集,這麼一來,當 LED 接到別支腳位,不再是 PB5 時,程式只需要調整 bitMask 巨集,其它地方都不用修改。
Arduino 腳位的位元遮罩對照表
利用位元遮罩的概念,我們可以進一步這樣做:
/*
* digitalPin_to_bitmask.pde:
* 讓一顆燈號閃爍,每隔一秒切換一次燈號,使用 _BV() 巨集與位元遮罩
* schematic:
* Connect a LED on PB5 (Arduino pin 13)
*/
// bit masks of Arduino digital pins
const byte digital_pin_to_bit_mask[] = {
_BV(0), /* 0, port D */
_BV(1),
_BV(2),
_BV(3),
_BV(4),
_BV(5),
_BV(6),
_BV(7),
_BV(0), /* 8, port B */
_BV(1),
_BV(2),
_BV(3),
_BV(4),
_BV(5),
_BV(0), /* 14, port C */
_BV(1),
_BV(2),
_BV(3),
_BV(4),
_BV(5),
};
const int ledPin = 13; // PB5
const byte bitMask = digital_pin_to_bit_mask[ledPin]; // will get _BV(5)
void setup()
{
DDRB |= bitMask; // 把 PB5 設置成 output pin
}
void loop()
{
PORTB |= bitMask; // 打開 LED 燈號
delay(1000);
PORTB &= ~bitMask; // 關閉 LED 燈號
delay(1000);
}在這個範例中,我們建了一個 Arduino digital pin 的位元遮罩對照表 digital_pin_to_bit_mask。我們知道, pin 13 就是 PB5,有了這張對照表,就可以很容易算出 pin 13 的位元遮罩,像這樣:
const int ledPin = 13; // PB5
const byte bitMask = digital_pin_to_bit_mask[ledPin]; // will get _BV(5)這會得到 _BV(5),也就是 PB5 的位元遮罩,亦即 pin 13 的位元遮罩。
動動腦
雖然上面的程式可以算出 Arduino digital pin 的位元遮罩,但是如果進一步思考會發現一個問題:因為 setup() 和 loop() 已經固定使用 PORTB,所以即便算出其它腳位的位元遮罩,比如座落在 PD2 的 pin 2 (位元遮罩是 _BV(2) ),到時真正受影響的卻還是 PB2。因此,如果你想控制 pin 2,除了改 ledPin 外,你還得修改 setup() 和 loop() 把其中的 DDRB 換成 DDRD,而 PORTB 換成 PORTD,這樣才行。
想想看,這個問題要怎麼解決才好呢?
2.3 Button
實驗目的
使用按鍵 (PushButton) 控制 LED,按鍵被按下時打開 LED,按鍵放開時關掉 LED。 材料
- Arduino 主板 x 1
- LED x 1
- Pushbutton x 1
- 10K 歐姆電阻 x 1
- 麵包板 x 1
- 單心線 x N
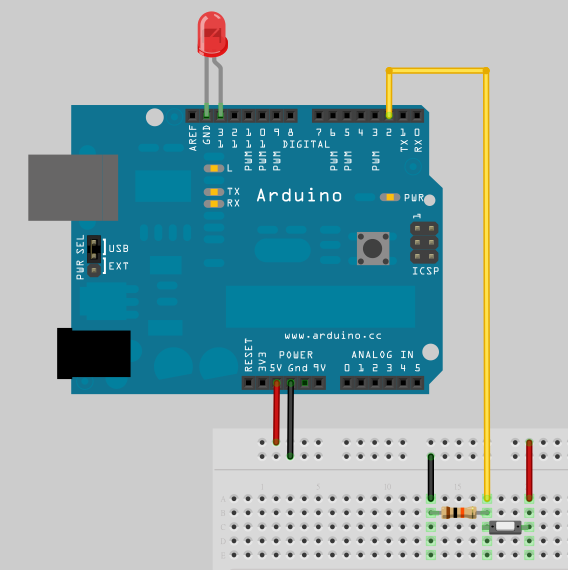
接線
把 LED 接到 pin 13,長腳 (陽極) 接到 pin 13,短腳 (陰極) 接到 GND 把 pushbutton 一支腳接到 +5V,另一支腳接到 pin 2 同時接一顆 10K 電阻連到 GND
程式碼
先來看 Arduino 版本的 Button 程式:
/*
* Button.pde: 使用按鍵 (PushButton)控制 LED 燈號的開關
*/
const int buttonPin = 2; // 按鈕(pushbutton)
const int ledPin = 13; // LED
int buttonState; // 用來儲存按鈕狀態
void setup() {
pinMode(ledPin, OUTPUT); // 把 ledPin 設置成 OUTPUT
pinMode(buttonPin, INPUT); // 把 buttonPin 設置成 INPUT
}
void loop(){
// 讀取按鈕的狀態
buttonState = digitalRead(buttonPin);
// 檢查按鈕是否被按下
// 是的話,buttonState 會是 HIGH
if (buttonState == HIGH) {
digitalWrite(ledPin, HIGH); // 打開 LED
}
else {
digitalWrite(ledPin, LOW); // 關閉 LED
}
}從腳位對應關係圖可知,PB5 就是 pin 13,而 PD2 就是 pin 2,所以現在我們可以改用 I/O Ports 暫存器重新改寫程式:
/*
* Button.pde: 使用按鍵 (PushButton)控制 LED 燈號的開關
*
* Pin map:
* Arduino pin 13 = PB5
* Arduino pin 2 = PD2
*/
// 底下兩個常數程式沒有用到,只是當作參考
const int buttonPin = 2; // 按鈕(pushbutton)
const int ledPin = 13; // LED
#define buttonPinBitMask _BV(2) // pin 2 = PD2
#define ledPinBitMask _BV(5) // pin 13 = PB5
int buttonState; // 用來儲存按鈕狀態
void setup()
{
DDRB |= ledPinBitMask; // 把 ledPin 設置成 OUTPUT
DDRD &= ~buttonPinBitMask; // 把 buttonPin 設置成 INPUT
}
void loop()
{
// 讀取按鈕的狀態
if (PIND & buttonPinBitMask) {
buttonState = HIGH;
} else {
buttonState = LOW;
}
// 檢查按鈕是否被按下
// 是的話,buttonState 會是 HIGH
if (buttonState == HIGH) {
PORTB |= ledPinBitMask; // 打開 LED
} else {
PORTB &= ~ledPinBitMask; // 關閉 LED
}
}程式為 PD2 和 PB5 兩支腳位分別定義了 buttonPinBitMask 和 ledPinBitMask 兩個位元遮罩,利用這兩個位元遮罩進行位元運算,透過 DDRx 暫存器決定腳位是 INPUT 或 OUTPUT 模式,用 PINx 暫存器讀取按鈕的腳位狀態,然後用 PORTx 暫存器控制 led 腳位的輸出訊號。 _BV() 巨集我們在前面已經介紹過。
到此相信你對 AVR 晶片的 I/O Ports 應該已經有足夠的了解了。
延伸閱讀
- ATmel 官網: AVR 8- and 32 bit
- ATmega168/328 Datasheet
- Wikipedia 百科全書: ATmel AVR
- Port Registers
- Arduino 筆記 – Lab1 Blinking a LED
- _BV 巨集介紹
- Arduino 筆記 – Lab2 使用按鍵控制 LED 燈號
【本文作者為馬萬圳,原文網址為: http://coopermaa2nd.blogspot.tw/2011/07/from-arduino-to-avr.html , http://coopermaa2nd.blogspot.tw/2011/07/1-avr.html , http://coopermaa2nd.blogspot.tw/2011/07/2-io-ports.html , http://coopermaa2nd.blogspot.tw/2011/04/21-blink-part-1.html , http://coopermaa2nd.blogspot.tw/2011/07/21-blink-part2.html , http://coopermaa2nd.blogspot.tw/2011/07/22-button.html ,由陳鍾誠編輯後納入本雜誌】