從 Arduino 到 AVR 晶片(2) -- Interrupts 中斷處理 (作者:Cooper Maa)
什麼是 Interrupts?
當你在工作的時候,突然電話鈴聲響起,於是你把手邊工作停下來、接電話、講電話,然後回來繼續剛剛工作 -- 這就是所謂的中斷 (Interrupt),而電話便是中斷源。
在微控制器中,中斷的來源有很多,諸如 Reset, 外部中斷, Timer, USART, EEPROM, ADC 等。比如,當 Timer Overflow 時可以引發中斷,當 USART 收到資料或資料傳輸完畢時可以引發中斷…
跟人一樣,在遇到中斷的時候,微控制器的 CPU 也會把手邊的工作停下來,然後跳到預設的位址 (接電話),接著執行一段程式 (講電話),執行完後回來繼續進行剛剛的工作。
在發生中斷的時候,CPU 會老老實實的做這幾個動作:
- 執行當前的指令
- 把下一個指令的位址 push 到 stack 上,停止程式的正常流程,然後
- 跳到預設的位址,這個位址稱為中斷向量表,是由 MCU 製造商預先定義好的。 在中斷向量表中,每個中斷都有一個 entry,就看發生什麼中斷,CPU 就跳到哪個 entry。通常每個 entry 裏只是一條 JMP xxxx 的指令,會讓 CPU 輾轉跳到一段稱為中斷服務函式 (Interrupt Service Routine, ISR) 的副程式。
- 接著執行中斷服務函式
- 當執行完中斷服務函式後,再從 stack 上 pop 出指令的位址,並從它離開的地方繼續執行程式
電腦比人強的地方,在於它的記憶力好,沒健忘症,當 CPU 處理完中斷後,一定會回去進行原來的工作,除非程式開發者疏忽了把 ISR 寫成跳不出來的無窮迴圈。
Interrupt vectors
底下這張是 ATmega328 的中斷向量表:
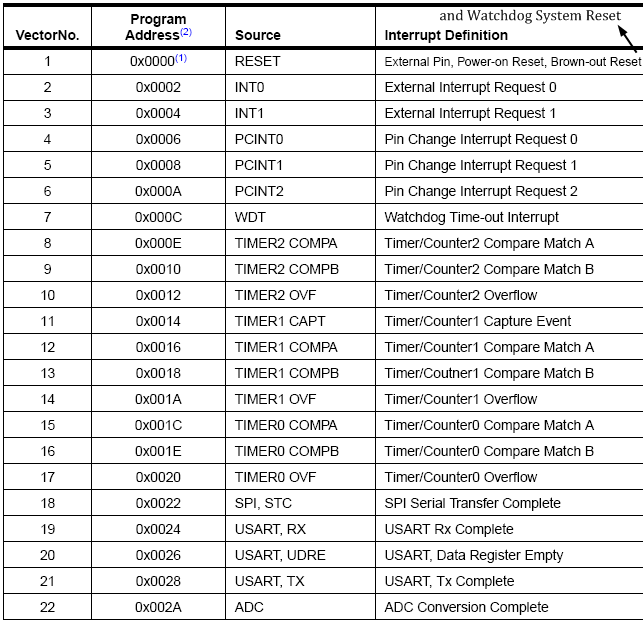
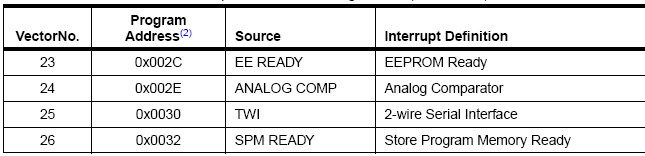
當中斷觸發時,CPU 會跳到預設的位址,例如當 ADC 轉換完成時會引發 ADC 中斷,CPU 這時就會跳到 0x002A 這個位址 (vector 22 所在的位址) 去執行指令。如前面說的,通常中斷向量表的每個 entry 裏只是一條 JMP xxxx 的指令,會讓 CPU 輾轉跳到中斷服務函式 (ISR)。
底下是中斷向量表典型的設定:
Address Labels Code Comments
0x0000 jmp RESET ; Reset Handler
0x0002 jmp EXT_INT0 ; IRQ0 Handler
0x0004 jmp EXT_INT1 ; IRQ1 Handler
0x0006 jmp PCINT0 ; PCINT0 Handler
0x0008 jmp PCINT1 ; PCINT1 Handler
0x000A jmp PCINT2 ; PCINT2 Handler
0x000C jmp WDT ; Watchdog Timer Handler
0x000E jmp TIM2_COMPA ; Timer2 Compare A Handler
0x0010 jmp TIM2_COMPB ; Timer2 Compare B Handler
0x0012 jmp TIM2_OVF ; Timer2 Overflow Handler
0x0014 jmp TIM1_CAPT ; Timer1 Capture Handler
0x0016 jmp TIM1_COMPA ; Timer1 Compare A Handler
0x0018 jmp TIM1_COMPB ; Timer1 Compare B Handler
0x001A jmp TIM1_OVF ; Timer1 Overflow Handler
0x001C jmp TIM0_COMPA ; Timer0 Compare A Handler
0x001E jmp TIM0_COMPB ; Timer0 Compare B Handler
0x0020 jmp TIM0_OVF ; Timer0 Overflow Handler
0x0022 jmp SPI_STC ; SPI Transfer Complete Handler
0x0024 jmp USART_RXC ; USART, RX Complete Handler
0x0026 jmp USART_UDRE ; USART, UDR Empty Handler
0x0028 jmp USART_TXC ; USART, TX Complete Handler
0x002A jmp ADC ; ADC Conversion Complete Handler
0x002C jmp EE_RDY ; EEPROM Ready Handler
0x002E jmp ANA_COMP ; Analog Comparator Handler
0x0030 jmp TWI ; 2-wire Serial Interface Handler
0x0032 jmp SPM_RDY ; Store Program Memory Ready Handler
;
0x0033RESET: ldi r16, high(RAMEND); Main program start
0x0034 out SPH,r16 ; Set Stack Pointer to top of RAM
0x0035 ldi r16, low(RAMEND)
0x0036 out SPL,r16
0x0037 sei ; Enable interrupts
0x0038 <instr> xxx以上面的程式為例,當發生 reset 中斷時,MCU 執行的第一條指令是 jmp RESET,因此會跳到 0x0033 的位址,亦即主程式的起始位置。假如是 ADC 中斷,MCU 會先跳到中斷向量表 0x002A 的位址,之後輾轉跳到 ADC 這個中斷服務函式。
Interrupt Service Routine (ISR)
在 Arduino 的程式中,要寫 ISR 是很簡單的一件事。你不需要自己設定中斷向量表,只要會使用 ISR() 這個巨集指令就可以了,例如:
ISR(ADC_vect)
{
// Your code here
}這表示這個是處理 ADC 轉換的中斷服務函式,將來當 ADC 轉換完成時會引發中斷,CPU 就會來執行這個中斷服務函式。
底下這張表列出了 ATmega328 的所有中斷向量,可在
| Vector | 說明 |
|---|---|
| INT0_vect | External Interrupt Request 0 |
| INT1_vect | External Interrupt Request 1 |
| PCINT0_vect | Pin Change Interrupt Request 0 |
| PCINT1_vect | Pin Change Interrupt Request 1 |
| PCINT2_vect | Pin Change Interrupt Request 2 |
| WDT_vect | Watchdog Time-out Interrupt |
| TIMER2_COMPA_vect | Timer/Counter2 Compare Match A |
| TIMER2_COMPB_vect | Timer/Counter2 Compare Match B |
| TIMER2_OVF_vect | Timer/Counter2 Overflow |
| TIMER1_CAPT_vect | Timer/Counter1 Capture Event |
| TIMER1_COMPA_vect | Timer/Counter1 Compare Match A |
| TIMER1_COMPB_vect | Timer/Counter1 Compare Match B |
| TIMER1_OVF_vect | Timer/Counter1 Overflow |
| TIMER0_COMPA_vect | TimerCounter0 Compare Match A |
| TIMER0_COMPB_vect | TimerCounter0 Compare Match B |
| TIMER0_OVF_vect | Timer/Couner0 Overflow |
| SPI_STC_vect | SPI Serial Transfer Complete |
| USART_RX_vect | USART Rx Complete |
| USART_UDRE_vect | USART, Data Register Empty |
| USART_TX_vect | USART Tx Complete |
| ADC_vect | ADC Conversion Complete |
| EE_READY_vect | EEPROM Ready |
| ANALOG_COMP_vect | Analog Comparator |
| TWI_vect | Two-wire Serial Interface |
| SPM_READY_vect | Store Program Memory Read |
外部中斷實驗 (External Interrupts)
實驗目的
練習處理外部中斷。在這個實驗中,你將利用 ISR() 巨集指令設定中斷服務函式 (Interrupt Service Routine, ISR),讓程式在 pin 2 產生外部中斷時自動執行 ISR。
材料
- Arduino 主板 x 1
- LED x 1
- Pushbutton x 1
- 10K 歐姆電阻 x 1
- 麵包板 x 1
- 單心線 x N
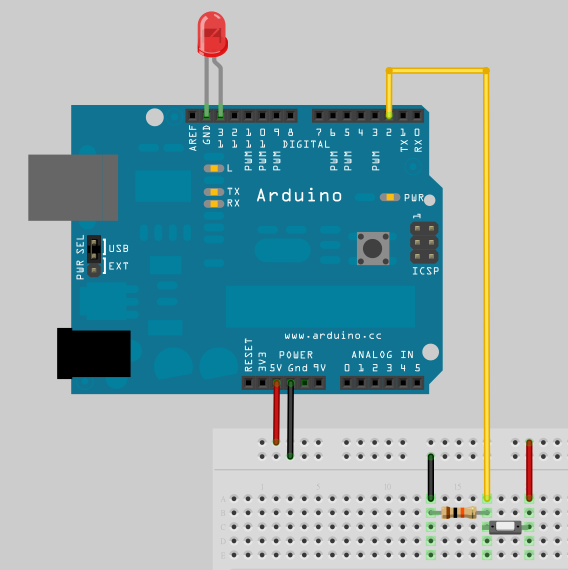
接線
把 LED 接到 pin13,長腳 (陽極) 接到 pin13,短腳 (陰極) 接到 GND 把 pushbutton 一支腳接到 +5V,另一支腳接到 pin 2 同時接一顆 10K 電阻連到 GND
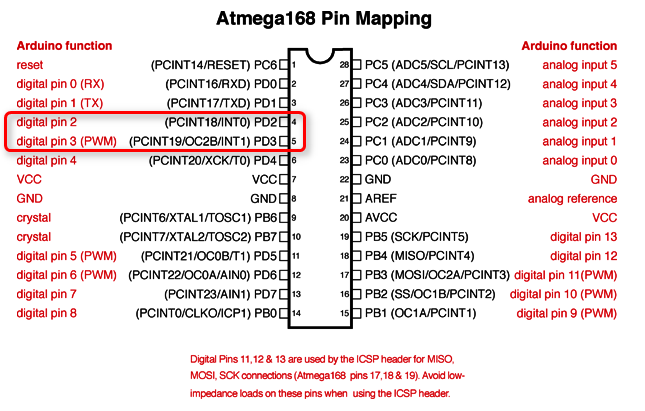
INT0 與 INT1 外部中斷
如下圖所示,ATmega328 有兩個外部中斷,編號 0 (INT0) 在 pin 2 上,而編號 1 (INT1) 在 pin 3 上:
我們可以決定什麼時候要觸發 INT0 和 INT1 外部中斷,一共有四種狀況可以選擇:
- LOW: 當 pin 為 LOW 時觸發中斷
- CHANGE: 當 pin 狀態改變時觸發中斷,不管是從 HIGH 到 LOW 或從 LOW 到 HIGH
- FALLING: 當 pin 狀態從 HIGH 到 LOW 時觸發中斷,又稱負緣觸發
- RISING: 當 pin 狀態從 LOW 到 HIGH 時觸發中斷,又稱正緣觸發
選擇的方法是透過 ECIRA (External Interrupt Control Register A) 這個暫存器:

▲ 資料來源: ATmega168/328 Datasheet
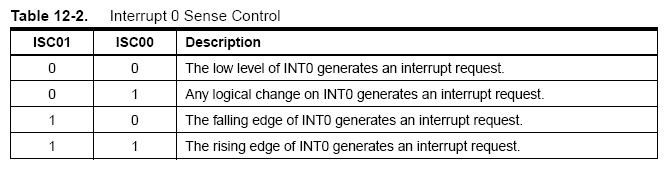
以 INT0 外部中斷為例,假如我們希望 pin 2 狀態一有改變就觸發中斷,那麼就要把 ISC01 和 ISC00 設成 01:
EICRA &= ~_BV(ISC01); // pin 狀態改變時觸發中斷
EICRA |= _BV(ISC00); 除此以外,我們還要設定 EIMSK (External Interrupt Mask Register) 暫存器以啟用 INT0 或 INT1 中斷:

以 INT0 外部中斷為例,要啟用 INT0 外部中斷,得把 INT0 這個位元設成 1:
EIMSK |= _BV(INT0); // enable INT0程式
先來看使用 attachInterrupt() 函式的版本(attachInterrupt.pde),這我們在「 attachInterrupt() 與外部中斷 」一文中介紹過,程式的邏輯是,當按鍵被按下時打開 LED 燈號,在按鍵放開時關閉 LED 燈號:
/*
* attachInterrupt.pde: attachInterrupt() 與外部中斷
*/
const int interruptNumber = 0; // Interrupt 0 在 pin 2 上
const int buttonPin = 2; // 按鈕(pushbutton)
const int ledPin = 13; // LED
volatile int buttonState; // 用來儲存按鈕狀態
void setup() {
pinMode(ledPin, OUTPUT); // 把 ledPin 設置成 OUTPUT
pinMode(buttonPin, INPUT); // 把 buttonPin 設置成 INPUT
// 把外部中斷(interrupt 0)連接到 buttonStateChanged() 函式
// CHANGE 是指當 pin 狀態改變時就觸發中斷,不管是從 HIGH 到 LOW 或從 LOW 到 HIGH
attachInterrupt(interruptNumber, buttonStateChanged, CHANGE);
}
void loop() {
// do nothing
}
// Interrupt 0 的中斷處理函式
// 讀取 buttonPin 的狀態,並反應到 ledPin 上
void buttonStateChanged() {
buttonState = digitalRead(buttonPin);
digitalWrite(ledPin, buttonState);
}要特別注意是,程式裏的 buttonState 變數是宣告成 volatile,這樣做的目的是告訴 Compiler 不要做最佳化,避免變數狀態不同步。給你一個建議,程式主體跟 ISR 都會用到的變數,盡可能把它宣告成 volatile。
接下來是改成用 EICRA 和 EIMSK 暫存器和 ISR() 巨集指令的版本:
/*
* externalInterrupt.pde: INT 0 外部中斷
*/
const int interruptNumber = 0; // Interrupt 0 在 pin 2 上
const int buttonPin = 2; // 按鈕(pushbutton)
const int ledPin = 13; // LED
volatile int buttonState; // 用來儲存按鈕狀態
void setup() {
pinMode(ledPin, OUTPUT); // 把 ledPin 設置成 OUTPUT
pinMode(buttonPin, INPUT); // 把 buttonPin 設置成 INPUT
EIMSK |= _BV(INT0); // enable INT 0
EICRA &= ~_BV(ISC01); // pin 狀態改變時觸發中斷
EICRA |= _BV(ISC00);
}
void loop() {
// do nothing
}
// 讀取 buttonPin 的狀態,並反應到 ledPin 上
void buttonStateChanged() {
buttonState = digitalRead(buttonPin);
digitalWrite(ledPin, buttonState);
}
// Interrupt 0 的中斷處理函式
ISR(INT0_vect) {
buttonStateChanged();
}簡單的說,要處理 INT0 外部中斷,有三個步驟要做:
- 用 ISR() 巨集指令定義中斷服務函式
- 設定 EIMSK 暫存器啟用 INT0 中斷
- 設定 EICRA 暫存器決定什麼時候該觸發中斷
_BV() 巨集我們在「2.2) Blink part2」一文中已經介紹過,如果不想使用 _BV(),這樣寫也是可以的:
EIMSK |= (1 << INT0); // enable INT 0
EICRA |= (1 << ISC00); // pin 狀態改變時觸發中斷
EICRA &= ~(1 << ISC01);另外,ISR() 巨集指令也可以改用 SIGNAL() 巨集指令,SIGNAL() 是早期寫 ISR 的巨集指令。建議你盡可能使用 ISR() 巨集指令,因為 ISR() 比較直覺,只不過你必須知道 SIGNAL() 和 ISR() 幾乎是一樣的東西,而且很多前輩留下的 AVR 程式是用 SIGNAL() 巨集指令。
延伸閱讀
【本文作者為馬萬圳,原文網址為: http://coopermaa2nd.blogspot.tw/2011/04/3-interrupts.html , http://coopermaa2nd.blogspot.tw/2011/07/31-external-interrupts.html ,由陳鍾誠編輯後納入本雜誌】